情報通信 群ロボットおよび群ロボットの集団移動制御方法
ココがポイント
「身近な物理現象を適用することで具現した、環境に応じた自律分散制御と集中制御との組み合わせを実現させた群ロボットおよび群ロボットの集団移動制御方法」
発明の概要
蜂や蟻、渡り鳥は、群れをなしています。一匹、一羽では環境に応じた想定内の行動しかしませんが、群れとなった大きな集団は、普通なら困難な道程でも越えていく行動が良く見られます。ロボットにおいても、ロボットが多数集まり群として動作する群ロボットシステムは、群れとしての特性と個としての特性を活用して、物品の搬送や、建設現場の監視など、多くの用途が期待されています。
情報通信工学科の鈴木剛教授が指導するネットワークロボティクス研究室では、センサネットワークとレスキューロボットによる被災地情報収集支援、追従移動ロボット等の情報通信ネットワークとロボティクスを応用したサービスシステムについて研究しています。群ロボットは研究室のテーマの一つとなっています。参考に鈴木剛教授の特許発明を示します。3番目がここでご紹介するシーズ発明です。

群ロボットを集団で移動させる場合を考えてみましょう。このような群ロボットシステム移動の実現には作動させる環境における経路道程、障害物の存在、経路の広狭などを十分に考慮した制御システムを備える必要があります。
たとえば、一台分のロボットの状態変数のみで構成する手法、群ロボットを構成するロボット相互の関係性を規制する手法、分子動体力学法と流体力学的な特性をロボット動作に組み込む手法などが提案されています。
しかしながら、これらは、それぞれ隊列・センシングに特徴を有する制御手法ですので、集中制御部が故障すると、全体システムの制御が困難になるおそれがありましたし、また、ロボット間の結合が高い状態での集団制御を行うことは難しいという問題がありました。
一方、この発明は、環境に応じた自律分散制御と集中制御との組み合わせを実現させた群ロボットおよび群ロボットの集団移動制御方法を提案しています。
この集団移動制御方法は、既知の物理現象を表す式を代用して制御するもので、態様変化が理解できる物理現象である熱力学モデル(熱エネルギ(温度変化等も含む)の授受、分子間力、相転移など)をあてはめています。こうすることで、問題が生じたときにでも解決策が容易に浮かび、対策を検討しやすくなります。
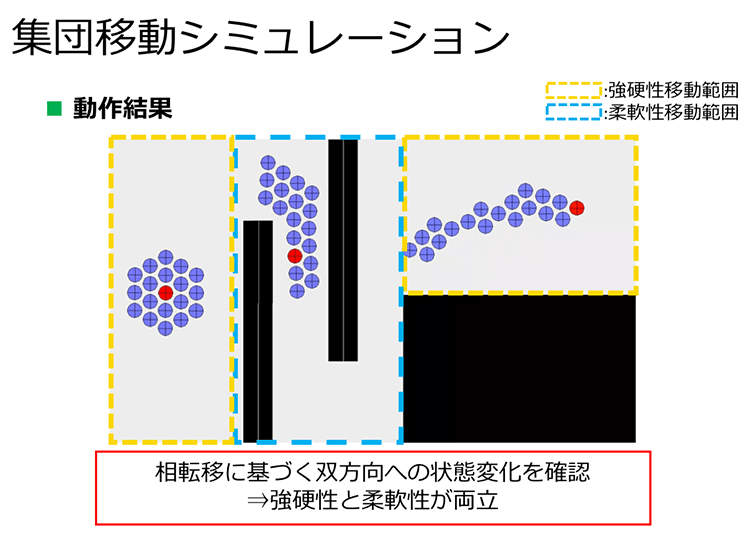
実際に群ロボットがどのような行動を示すか説明しましょう。図をご覧ください。青色と赤色に塗られた円一つひとつがロボットを示しています。赤色がリーダロボットで、外部から右側の目的地へ到達する旨の指令を受けます。そして、このリーダロボットを取り囲む青色のフォロワロボットとともに群ロボットとなって目的地へ向かいます。
群ロボットが集団移動(強行性移動範囲)して隘路に近づいたとき、最初にフォロワロボットが障害物となる隘路の入り口に近づきます。仮想的な高熱源とした障害物に近づいたフォロワロボットの温度は上昇し、フォロワロボット相互間に働く仮想的な分子間力(引力)が弱まります(柔軟性移動範囲)。そして、この作用によってフォロワロボットの自由度は増すため、群ロボットは密集した編隊から、隘路の幅に応じて縦長の編隊に変化して、隘路を通過することができます。
Amazon.com,Inc.は、配送センターの搬送作業に群ロボットを導入し、大規模な人件費削減の見通しを発表しています。また、株式会社ispaceとジグソー株式会社は、宇宙空間における資源探査のための群ロボットを開発しており、2018~2023年にかけての実用化を予定しています。このように、群ロボットは広大な作業領域等における過酷な労働を代替する手段として実用段階にあり、物流をはじめ、建設分野、災害対応などへの応用が考えられます。この発明は、このようなシステムの基本機能として、さまざまな応用分野の群ロボットシステムへ実装することができます。
以上のようにこのシーズ技術「群ロボットの集団移動制御方法」は、今後の群ロボットの開発の大きな流れの一つになる可能性を秘めています。
基本技術の高度化、応用技術の開発、利用等、企業の皆様のウォンツ・ニーズに応じた種々のご提案ができますので、お気軽にお問い合わせいただければ幸いです。
【出願情報】
発明の名称:「群ロボットおよび群ロボットの集団移動制御方法」
出願番号:特願2016-113085
出願日:平成28年6月6日

関連コンテンツ
-
バイオリファイナリー(Biorefinery)とは
-
浮かぶ液滴内で細胞塊を培養
-
DLC(ダイヤモンドライクカーボン;非晶質炭素膜)の機械特性および生体適合性を活用した画期的医療デバイスの開発
-
歩きやすい下肢装具を目指して!
-
「平面度測定」において、これまでできなかった半径方向微分をリアルタイムで観測の新しい提案
-
現在のインターネットの限界を超えて、あらゆる「ひと」「もの」「情報」を安心・安全・簡単につなげられる、次世代のネットワーク方式
-
いつも通り寝るだけで、複数の生体情報 (心電図・ 呼吸・脈動) と離着床行動を同時に計測
-
AIの未知領域である「協調」をキーワードとした研究「気づかい」を定量化
-
空気中の環境汚染物質を調べる小さな「半導体式ガスセンサ」
-
外科手術における究極の課題を解決!
-
ナノ構造体でクリーンなエネルギーを創る!
-
常温で有機発行体による手軽にガスセンシング
-
蝶をモデルとした小型はばたきロボットの開発
-
群ロボットおよび群ロボットの集団移動制御方法
-
一目見れば納得、タッチ式メジャー