フロンティア 蝶をモデルとした小型はばたきロボットの開発
~ひらひらと宙を舞うロボット~
ココがポイント
蝶をモデルとした小型はばたきロボットの開発
~ひらひらと宙を舞うロボット~
発明の概要
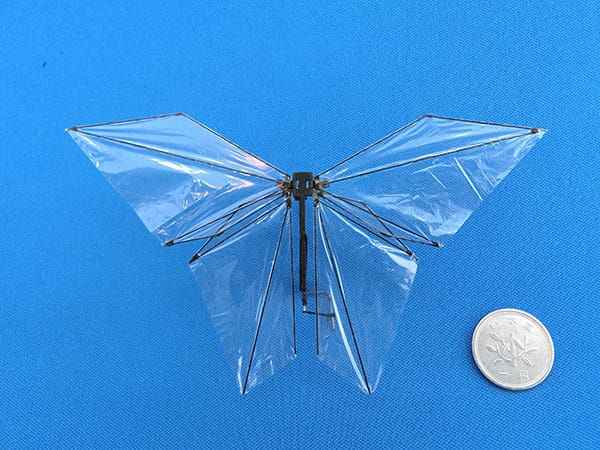
近年、観測システムなどでの利用を目的とした小型飛行ロボットの開発が盛んですが、より小さな昆虫サイズのロボット研究も進められています。しかし、わずか数cm・数gサイズの機体に動力や姿勢制御のための複数のアクチュエータ、センサなどを搭載する事は困難であり、未だ実用化には至っていません。
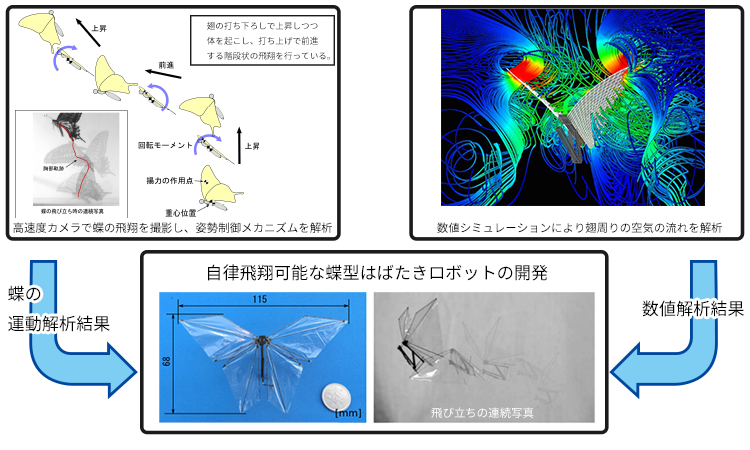
蝶の中で「アゲハチョウ」をモデルとして飛翔メカニズムを解析。翅の打ち下ろしで上昇しつつ体を起こし、打ち上げで前進する仕組みすなわち「階段状の飛翔」を実現しています。
このような動作を実現するために、はばたき機構を勘案し、蝶と同様の飛翔を実現しています。
展示会でも小型はばたきロボットは、参加者の児童にも科学的な刺激を与え、「将来同じようなロボットを、開発したい」という夢を与える一幕もありました。
この機構は藤川先生が、千葉工業大学菊池研究室在籍時に特許を取得され、先生の研究は2015年4月号の科学雑誌「ニュートン」にも掲載されました。
今後の展開
今後超小型のアクチュエータやバッテリー、カメラ、センサなどを搭載し、様々な場面で活用されることを期待しています。 省自由度で姿勢制御を可能とする蝶と同サイズかつ同質量(500mg、翼幅100mm程度)の小型はばたきロボットを開発。
- 災害現場におけるがれきの隙間など狭隘空間での観測システム。
- 広域に多数飛翔させ、情報収集を図る群ロボットシステム。
- イベント、アミューズメント用ロボット
皆様のご相談をお待ちしております。

関連コンテンツ
-
バイオリファイナリー(Biorefinery)とは
-
浮かぶ液滴内で細胞塊を培養
-
DLC(ダイヤモンドライクカーボン;非晶質炭素膜)の機械特性および生体適合性を活用した画期的医療デバイスの開発
-
歩きやすい下肢装具を目指して!
-
「平面度測定」において、これまでできなかった半径方向微分をリアルタイムで観測の新しい提案
-
現在のインターネットの限界を超えて、あらゆる「ひと」「もの」「情報」を安心・安全・簡単につなげられる、次世代のネットワーク方式
-
いつも通り寝るだけで、複数の生体情報 (心電図・ 呼吸・脈動) と離着床行動を同時に計測
-
AIの未知領域である「協調」をキーワードとした研究「気づかい」を定量化
-
空気中の環境汚染物質を調べる小さな「半導体式ガスセンサ」
-
外科手術における究極の課題を解決!
-
ナノ構造体でクリーンなエネルギーを創る!
-
常温で有機発行体による手軽にガスセンシング
-
蝶をモデルとした小型はばたきロボットの開発
-
群ロボットおよび群ロボットの集団移動制御方法
-
一目見れば納得、タッチ式メジャー