2021年10月 今月の顔 伊東 明俊 教授
2021年10月号から今月の顔 工学部 機械工学科 伊東明俊教授をご紹介します
口腔内コントローラの開発で新聞紹介
工学部 機械工学科
伊東 明俊 教授
早稲田大学大学院博士後期課程退学 博士(工学)。
早稲田大学助手、群馬大学助手を経て、1994年本学工学部講師。2002年より現職。
 伊東教授と、口腔内コントローラを付けた電動車椅子に乗る修士1年の吉田直煕さん
伊東教授と、口腔内コントローラを付けた電動車椅子に乗る修士1年の吉田直煕さん
軟体型圧力センサによる電動義手の駆動
 電動義手による絹ごし豆腐の把持
電動義手による絹ごし豆腐の把持
筆者の研究室では、軟体型圧力センサによる電動義手の駆動研究を行っていました。通常の電動義手は、筋電位によって駆動します。しかし、筋電位は筋肉の活動に伴う微弱な生体信号により駆動しますので、ノイズに弱く、実用的な電動義手では、指先の開閉動作をさせるのが精いっぱいなのが現状であり、値段の割にできることが少なく、実際に使われることが少ないという問題がありました。
これを、半球状の柔らかなシリコーンゴム膜の内部にフォトリフレクタを内蔵した軟体型圧力センサで、筋肉の膨張・かたさ変化を計測し、それをもとに電動義手を駆動する方式に改めました。このセンサではノイズがほとんどなく、極めて安定した駆動ができるため、指の開閉だけではなく、開閉速度の調整、センサの増設による手首の回旋機能の導入など、簡単に成功しました。STEF(簡易上肢機能検査)では、筋電義手をはるかに凌駕する操作性を示しました。さらに、本センサを義手の指先につけることで、なんと絹ごし豆腐を持たせることができ、これを日本機械学会Robomech2016にて発表したところ、義手はもちろんのこと、最新のロボットハンドでも絹ごし豆腐の把持は難しいのにと、大騒ぎになりました。
ペンフィールドのホムンクルス
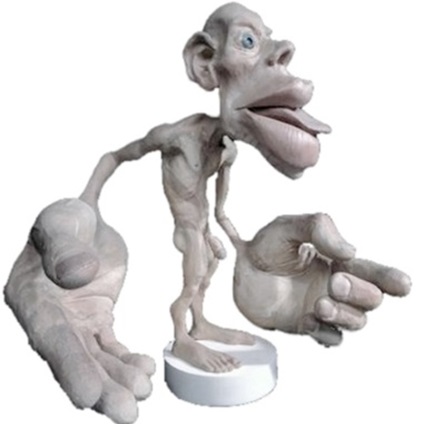 ペンフィールドのホムンクルス脳内の処理面積に比例して体の大きさを改変した人形
ペンフィールドのホムンクルス脳内の処理面積に比例して体の大きさを改変した人形
しかしながら、自分でも義手を駆動していて、前腕や上腕の筋肉で手の動作を作り出すことに、何か違和感を感じました。ペンフィールドのホムンクルスによると、人の脳内では、手の占める割合が圧倒的に大きく、次に舌や口腔内が大面積を占めます。前腕や上腕の占める面積はわずかです。今の義手のような極めて単機能なものであれば駆動情報を作り出せますが、今後義手が高機能化し人の手のようになったとき、前腕や上腕の筋肉で本当に繊細な駆動情報を作り出せるのか?もっと人の思いを自在に表現できないと手を駆動することは難しいのではないかと考えたわけです。
口腔内コントローラの開発
 口腔内コントローラ
口腔内コントローラ
口はしゃべるときと食べるとき以外は空いています。もともと高機能で、しゃべるために人の思い通りに舌や口腔を複雑に動かすことができるのは、皆知っていることです。しかし、カメレオンでもないと、届く範囲が狭すぎ、そのまま手の代わりにはなりません。そこで、舌の高機能性を生かして、コントローラに使えれば、こちらの意志を自在に機械に伝えるインターフェースとして使えるのではないかと考え、現在開発しているのが、口腔内コントローラです。
構造は、軟体型圧力センサ同様、半球状のシリコーンゴムを舌で変形させる構造ですが、内部にフォトリフレクタを3つ均等配置してあり、これにより変形方向も割り出せるようになっています。当初は口の前方に設置して舌で押して上下左右に動かして制御する形式のものを作りました。これにより、電動車椅子を操縦したり、ロボットアームを第三の手として舌で操縦して、健常者のはんだ付け作業を補助させたりすることに成功しました。
現在、舌の疲労を減らすべく、設置位置を口腔の上方に変更し、舌を前後左右に動かして操縦するタイプのコントローラに改良している最中です。
この話をRobomech2021にて発表したところ、日刊工業新聞が取り上げてくれました。このコントローラの有効利用について、良いアイデアが思い浮かばれたら、是非ご連絡ください。特に「ヘイシリ」とか「ハイアレクサ」など、コンピュータに言葉で指示するのが嫌でしょうがない筆者のような方、よろしくお願いします。
 口腔内コントローラで第三の手・ロボットハンドを操縦して、はんだ付け作業の補助をしている様子(卒業生の山崎航太郎さん)
口腔内コントローラで第三の手・ロボットハンドを操縦して、はんだ付け作業の補助をしている様子(卒業生の山崎航太郎さん)
 口腔内コントローラで電動車椅子の操縦実験を行っている、吉田直煕さん(M1)と佐々木美遥さん(B4)
口腔内コントローラで電動車椅子の操縦実験を行っている、吉田直煕さん(M1)と佐々木美遥さん(B4)
学園広報誌「TDU Agora」Vol.46(2021年10月号) 今月の顔より転載

◆ご意見、ご感想、情報など是非お寄せください。
【編集・発行】学校法人東京電機大学 総務部企画広報担当
120-8551東京都足立区千住旭町5番
E-mail:keiei★dendai.ac.jp(★をアットマークに換えてください)
関連コンテンツ
-
2024年5月 働く電大人 福嶋 圭次郎さん
-
2024年4月 キラリ☆電大生 大石 澄海さん
-
2024年2月 高大連携
-
2024年1月 特集 電大女子特集
-
2023年11月 3Dプリンタによるミニ四駆のリバースエンジニアリング
-
2023年9月 キラリ☆電大生 高矢 空さん
-
2023年9月 キラリ☆電大生 春間 祐希さん
-
2023年9月 特集 IDCロボットコンテスト2023 in Thailand
-
2023年7月 中学校・高等学校
-
2023年7月 キラリ☆電大生 丸山尚哉さん、江澤菜歩子さん
-
2023年6月 今月の顔 河上 睦 准教授
-
2023年6月 全学初年次科目「東京電機大学で学ぶ」
-
2023年5月 働く電大人 立花嘉一さん
-
2023年5月 はたらく学生
-
2023年4月 キラリ☆電大生 M.Rさん
-
2023年4月 高大連携と小中学校等への出張講義
-
2023年2月 卒業生による仕事研究セミナー
-
2023年1月 今月の顔 橋本学 特別専任教授
-
2022年12月 TOPICS
-
2022年12月 特集 東京電機大学 学園祭
-
2022年11月 働く電大人 星野 拓吉さん
-
2022年11月 特集 高大連携への取り組み
-
2022年10月 特集 小学生が大学で学ぶ「子ども大学はとやま」
-
2022年10月 今月の顔 阿部善也 助教
-
2022年9月 今月の顔 渡邉翔一郎 准教授
-
2022年9月 特集 IDCロボットコンテスト2022
-
2022年7月 働く電大人 合川茉里さん
-
2022年7月 今月の顔 古屋治 教授
-
2022年6月 キラリ★電大生 チームAID
-
2022年6月 働く電大人 今井 正さん
-
2022年5月 特集 若手研究者育成支援制度 令和4年度の採用者5名を決定
-
2022年5月 今月の顔 高橋俊介 助教
-
2022年4月 今月の顔 五十嵐 洋 教授
-
2022年4月 特集 東京電機大学 B-project
-
2022年3月 キラリ☆電大生 中久喜 丈一さん、栗原 史弥さん
-
2022年2月 特集 第19回TDUアイディアコンテスト
-
2022年2月 キラリ☆電大生 吹金原 榛耶さん
-
2022年1月 今月の顔 宍戸 真 教授
-
2022年1月 キラリ☆電大生 ミャッ エンダラ スユエさん
-
2021年12月 働く電大人 坂本 結衣さん
-
2021年12月 今月の顔 保倉 明子 教授
-
2021年11月 今月の顔 三井 和幸 教授
-
2021年11月 特集 東京電機大学ハイブリッド学園祭
-
2021年10月 キラリ☆電大生 農かがく
-
2021年10月 今月の顔 伊東 明俊 教授
-
2021年9月 今月の顔 井ノ上寛人 助教
-
2021年9月 特集 IDCロボットコンテスト2021
-
2021年7月 本学高等学校 生徒の活躍
-
2021年7月 働く電大人 沼田 彩子さん
-
2021年6月 今月の顔 岩城和哉 教授
-
2021年6月 キラリ☆電大生 津國和泉さん
-
2021年5月 キラリ☆電大生 西垣一馬さん
-
2021年5月 今月の顔 吉田 俊哉 教授
-
2021年4月 キラリ☆電大生 ソフトウェア研究部
その他のコンテンツ
- 大学紹介
- 基本情報
- 学長挨拶
- 顧問学長対談
- 副学長・学部長等 役職者
- 建学の精神と教育・研究理念
- 東京電機大学大学院・大学の3つのポリシー
- 大学のあゆみ
- 大学の取り組み
- 情報公開
- 認証評価、自己点検・評価
- ホームカミングデー
- 東京電機大学が求める教員像
- 教育関係附置施設
- キャンパス紹介
- 東京電機大学大学のアセスメント・ポリシー
- 学園紹介
- 学校法人東京電機大学概要
- 理事長挨拶
- 理事・監事
- 評議員
- 事業・財務情報
- ガバナンス
- 学園創立100周年宣言
- 学園広報物
- TDUコメンテーター教員紹介
- 学園へのご寄付
- 学校法人東京電機大学が求める事務・技術職員像
- 学園創立110周年記念事業
- 系列校・関連機関
- 寄附行為等
- 危機管理
- 新型コロナウイルス感染者状況
- 学校法人東京電機大学中期計画~TDU Vision2028~
- 学部
- システムデザイン工学部
- 未来科学部
- 工学部
- 工学部第二部
- 理工学部
- 大学院
- 大学院での学び
- 先端科学技術研究科
- システムデザイン工学研究科
- 未来科学研究科
- 工学研究科
- 理工学研究科
- 入試・オープンキャンパス
- 大学入試
- 大学院入試
- インターネット出願/マイページ
- 入学者選抜要項
- 入試結果
- オープンキャンパス2025
- オンライン個別相談会
- 進学相談会
- キャンパス見学会
- キャンパス自由見学
- キャンパス見学
- メールマガジン
- ざっくりまとめました! 東京電機大学の7つのこと
- 【一般選抜】東京千住キャンパス試験会場案内(ストリートビュー)
- 1分で電大が分かる!ショート動画
- 受験生への応援メッセージ
- キャリアプログラム
- 学内就職サイト
- 就職支援
- 資格取得・教員免許
- 公開講座
- 履修証明プログラム
- 実践知教育
- 留学・国際交流
- 本学へ留学希望の方
- 本学へ留学希望の方(最新TOPICS)
- 海外に留学希望の方
- 海外に留学希望の方(最新TOPICS)
- 海外留学動画(学内者専用)
- 国際センター
- TDU International Workshop
- International Workshop
- スチューデントアンバサダー
- 国内でできる国際交流
- 在留期間更新許可申請
- 学生生活
- 学生要覧
- 履修の手引き
- 教職課程
- シラバス・時間割
- 年間予定
- 学習サポートセンター
- 学生アドバイザー
- 障害のある学生への支援
- その他授業関係
- 学費
- 奨学金
- 教育ローン・短期貸与金制度
- 保険制度・経費補助
- 証明書発行・事務窓口
- 学生相談室・健康相談室
- 休学・退学などについて
- クラブ・サークル活動
- 学生食堂と売店
- 車両通学
- ⾼等教育の修学支援新制度(授業料等減免・給付型奨学金の支援)について
- 東京電機大学後援会
- 教育訓練給付制度